配備Mag648低功耗磁通門傳感器的水下滑翔器進行磁異常填圖
發布時間:2021-02-19 會員:duncan
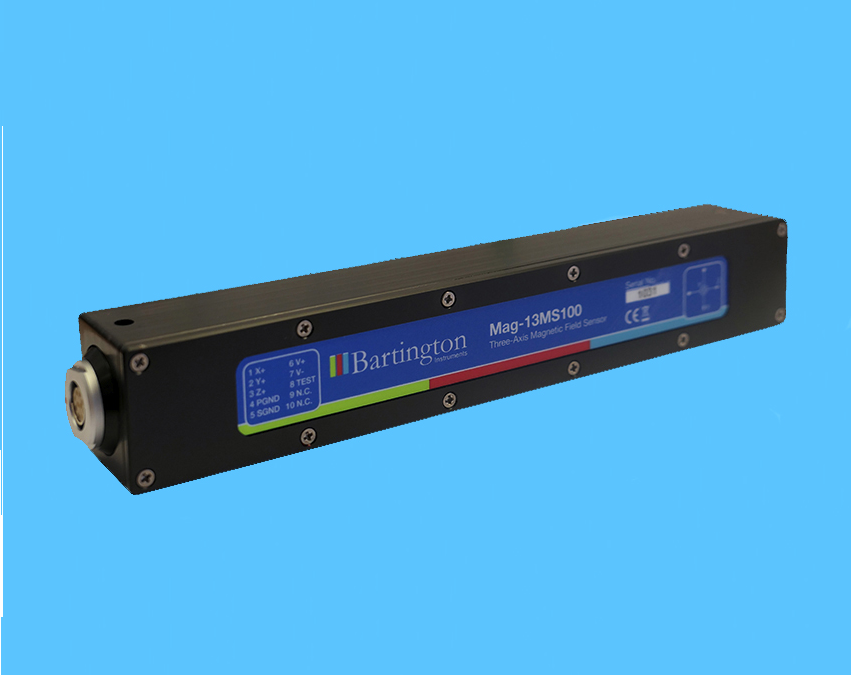
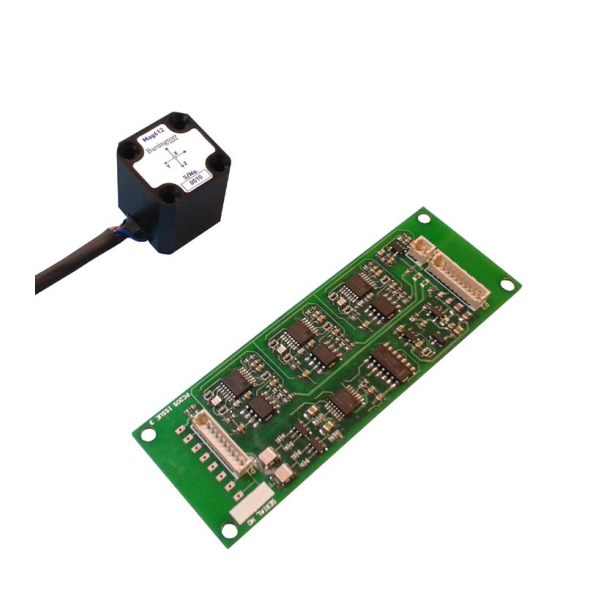
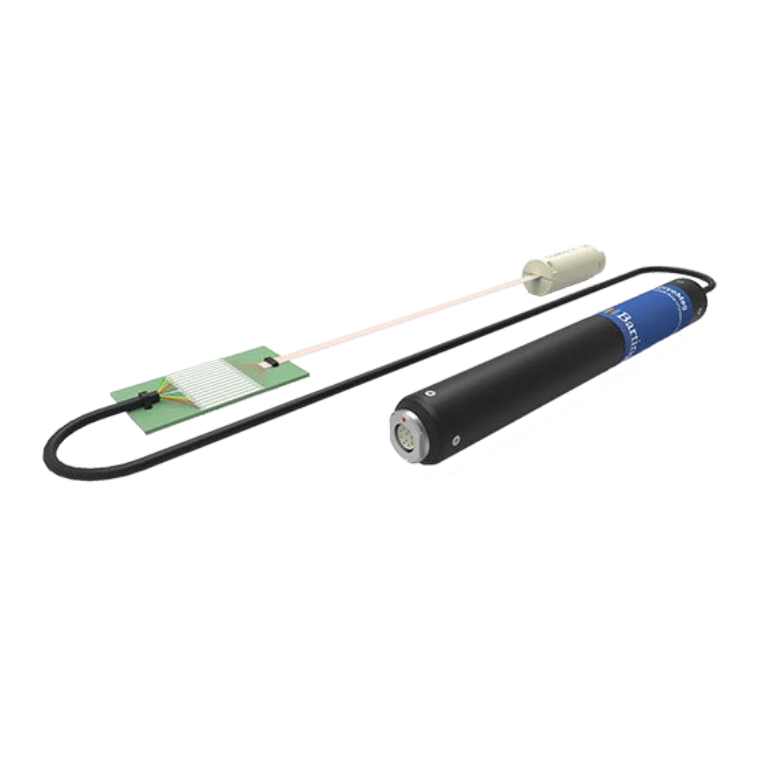
本案例探究了如何在水下滑翔器上安裝低功耗、低噪聲的Bartington儀器Mag648MXL磁場傳感器,以進行磁異常測量。
磁異常被定義為該位置的磁場與地球參考場的偏差。這些測量可以用類似地形圖的方式可視化。磁異常圖可將在海洋結冰期間輔助無人機器人的導航,延長使用到夏季之后。
水下滑翔器是一種使用配重的特殊類型的無人機器人,在海洋環境監測領域描繪不同水層。水下滑翔器靠正負浮力循環控制下沉和上浮,并以鋸齒狀方式前進。每個任務將持續大約四周,跨域500英里。水下滑翔器的一個顯著特征是在穩態滑翔過程中,電機和泵的動態噪聲很低。
導航
滑翔器在水下使用航位推算法,結合水平和下潛速率、航向和磁羅盤估算位置。由于速度估計的不確定性和未知海流的存在,位置估算的誤差隨著時間的推移而增加,所以必須通過每隔幾個小時浮出水面來獲取GPS定位。
需要浮出水面進行位置更新,這是一個相當大的缺點,特別是在一些不能上浮的區域,例如冰雪覆蓋的拉布拉多海和紐芬蘭北海岸的地區。為了在冰季幫助導航,需要配備有下述的磁傳感器設備的水下滑翔器,在無冰季節創建該區域的磁異常圖。
磁傳感器設備
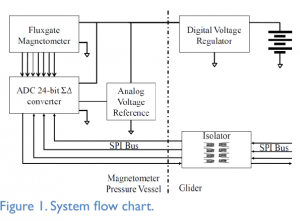
圖1是描述Mag648傳感器集成到滑翔器系統中的信號流程圖。AD7794一個24位Σ-Δ型ADC , 通過串行外圍設備接口(SPI)連接數字隔離器。該傳感器有一個專用的電池組,其中包含三個主要的鋰AA電池,可以運行約30天-大約與滑翔器服役時間相同。 最終集成到滑翔器的系統,能夠具有在1Hz或0.025 nTrms /√Hz處全量程約22位的有效分辨率。該分辨率僅比Mag648公布的0.01 nTrms /√Hz的精度稍大。

校準(calibration)
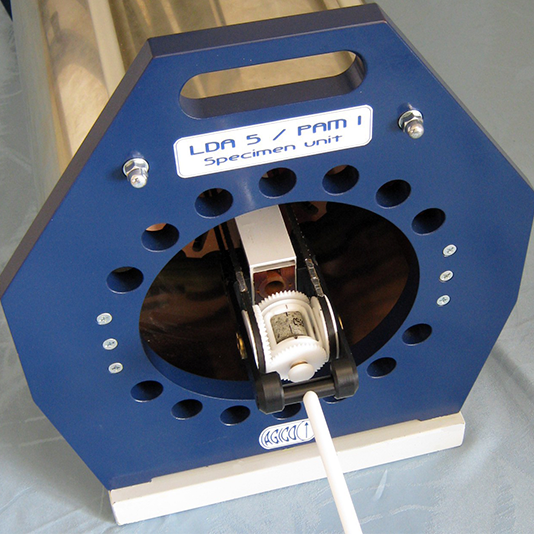
在理想情況下測量時,不考慮儀器的方向,測量的時間變化磁場應該是顯示恒定的大小。但是,由于傳感器安裝在包含各種鐵磁性部件(如電池和其他物品)的設備內,因此必須校準設備對測量的影響。而且儀器本身也對測量有影響。
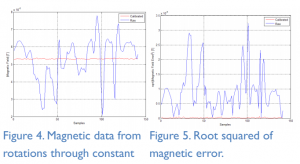
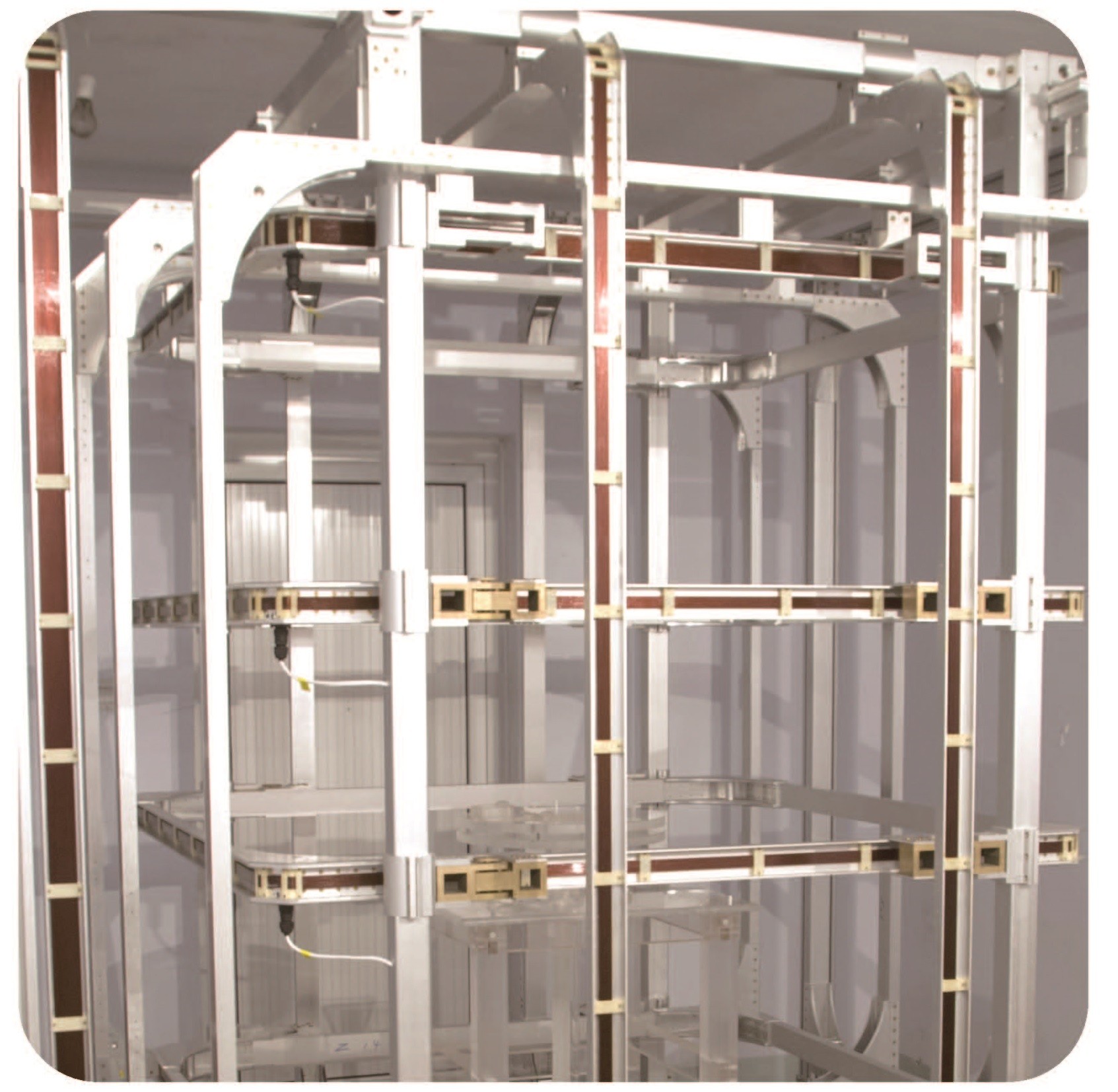
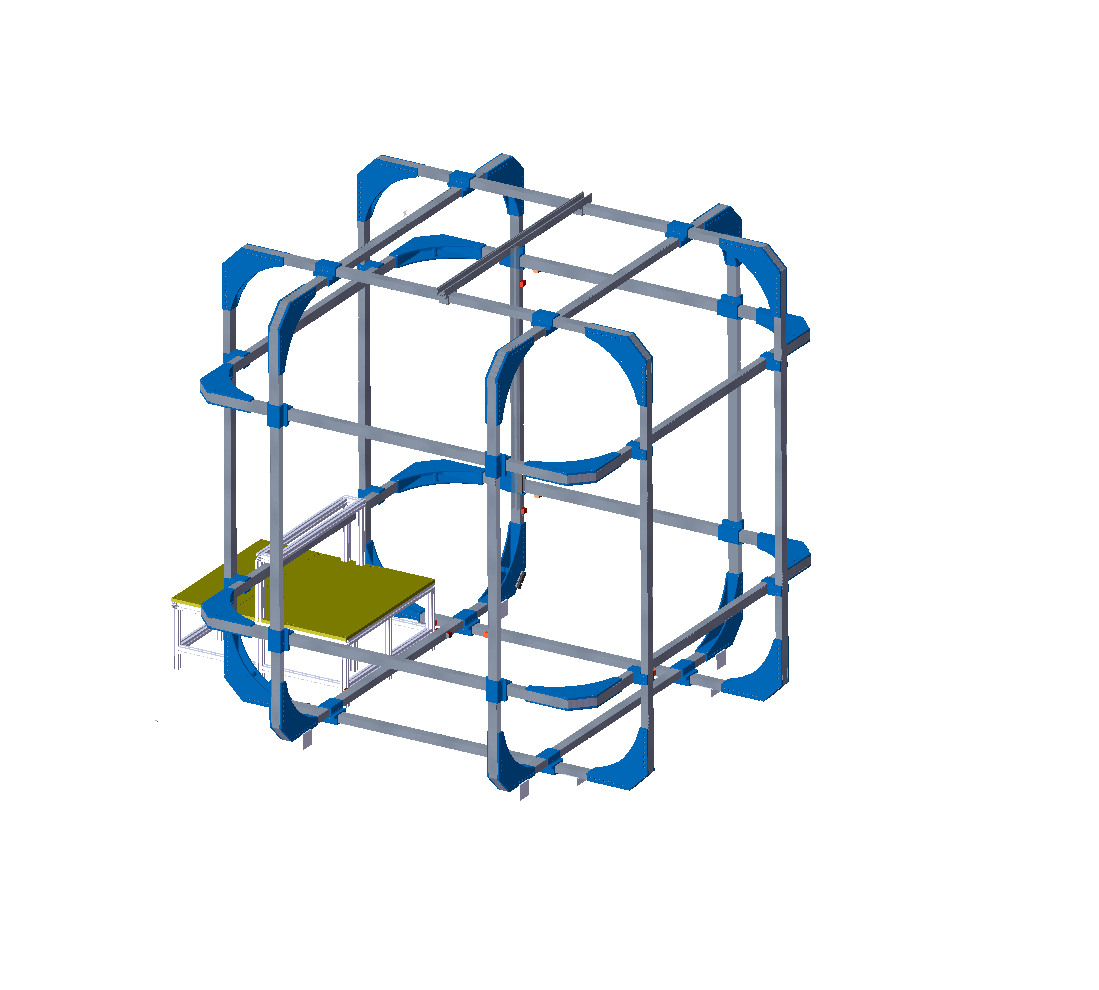
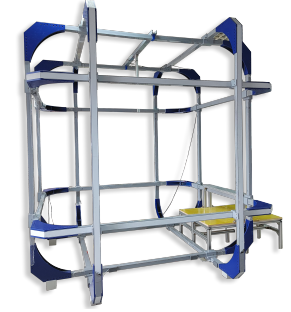
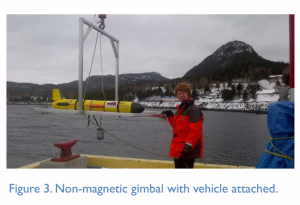
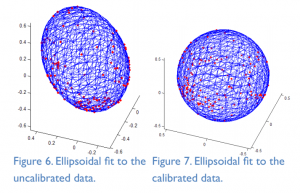
為了實現此校準,將測量的失真視為集總效應,其會導致測量結果的比例,偏移和旋轉。為了找到這些參量,將設備置于非磁性轉向臺上(見圖3),并通過所有三個軸旋轉以覆蓋測量空間,同時記錄幅值(見圖4、5)。 然后將橢球體擬合到該數據(見圖6),可以通過找到將橢球體轉換為以原點為中心的球體的條件(見圖7)來估計校準參數(見圖7)[1]。 校正后的數據可以通過減去偏差并去除旋轉和縮放比例來估算,如[2]:hc = S-1R’(hr – b),其中S是比例矩陣,R是旋轉矩陣,b是偏差, HR是原始磁數據,而HC是校準磁數據。
結論(conclusion)
截至2012年4月,該系統的校準工作已接近完成,今年夏天將進行現場試驗以收集數據并開始繪制地圖。
引文(References)
[1] Petrov, Yuri..“橢球擬合”,MATLAB中央文件交換,2009年。
[2] Vasconcelos JF,Elkaim G,Silvestre C,Oliveira P,CardeiraB。《捷聯磁力計校準傳感器框架的幾何方法》 航空航天和電子系統,IEEE事務。2011年4月; 47(2):1293-1306。
掃一掃了解更多

關注我們
優賽寰宇

關注我們
古地磁通訊

關注我們
磁測量專家